Koreksi Diferensial GPS Praktis di Handphone Android Menggunakan Aplikasi Mobile Topographer
Koreksi Diferensial adalah teknik untuk meningkatkan akurasi pengamatan posisi GPS/GNSS dengan cara membandingkan hasil pengukuran dari dua receiver GPS atau lebih. Ilustrasi tentang koreksi diferensial dan manfaatnya dapat dilihat dari link INI.
Koreksi diferensial dapat dilakukan secara otomatis secara real time (saat pengukuran di lapangan) atau post processing (koreksi pasca lapangan di komputer). Koreksi diferensial dapat dilakukan secara manual/praktis atau otomatis menggunakan software, yang penting pengamatan koordinat pada lokasi yang diukur dan lokasi referensi dilakukan pada waktu yang sama persis.
Umumnya dukungan koreksi diferensial yang "robust" hanya tersedia pada perangkat receiver/antenna yang mendukung code dan atau carrier phase (receiver kelas mapping sampai geodetic), sementara untuk perangkat GPS handheld/navigasi, proses ini agak sulit untuk dilakukan secara presisi.
Walaupun demikian, sebagaimana pengembangan teknik dan alat pengukuran GPS untuk memperoleh koordinat yang akurat yang selalu berkembang, terdapat banyak cara untuk melakukan koreksi diferensial di perangkat GPS navigasi, bahkan handphone sebagaimana yang bisa dilakukan oleh aplikasi Mobile Topographer di sistem operasi Android.
Mobile Topographer dapat diunduh dari Google Play di SINI.

Ada dua cara yang bisa digunakan untuk menentukan lokasi referensi/base (yang dianggap akurat, presisi, bebas distorsi, lokasi ini digunakan sebagai referensi untuk mengkoreksi pembacaan alias rover) dalam Mobile Topographer,
1. Dengan cara Weight/Waypoint Averaging yang didasarkan pada perataan hasil logging data selama 5 menit dengan interval logging 1 detik. Weight Averaging adalah teknik perataan koordinat yang diambil dari dua atau lebih koordinat dari pembacaan GPS pada lokasi yang sama guna menghasilkan koordinat rata rata yang diasumsikan sebagai koordinat paling akurat (biasanya memang lebih akurat daripada pembacaan langsung sebagaimana biasa dilakukan di perangkat GPS handheld/navigasi) dan presisi dari lokasi yang bersangkutan. Lokasi hasil averaging kemudian ditampilkan di peta/google maps. Kemudian operator melihat kesesuaian antara lokasi hasil averaging yang ditampilkan di peta dengan lokasi lapangan, jika ada pergeseran, operator diminta memindahkan lokasi titik ke lokasi sebenarnya di lapangan. Perpindahan ini dianggap sebagai faktor koreksi oleh aplikasi, yang kemudian dijadikan dasar koreksi untuk pembacaan/logging data GPS selanjutnya.
2. Dengan memasukkan "known point" atau memasukkan koordinat "asli atau akurat" dari lokasi tersebut secara manual, kemudian aplikasi akan menghitung menggunakan weight averaging koordinat lokasi tersebut dalam selang waktu tertentu, selanjutnya hasil pembacaan averaging tersebut dibandingkan dengan data "known point" tersebut, dan selisihnya dijadikan faktor koreksi untuk pembacaan selanjutnya.
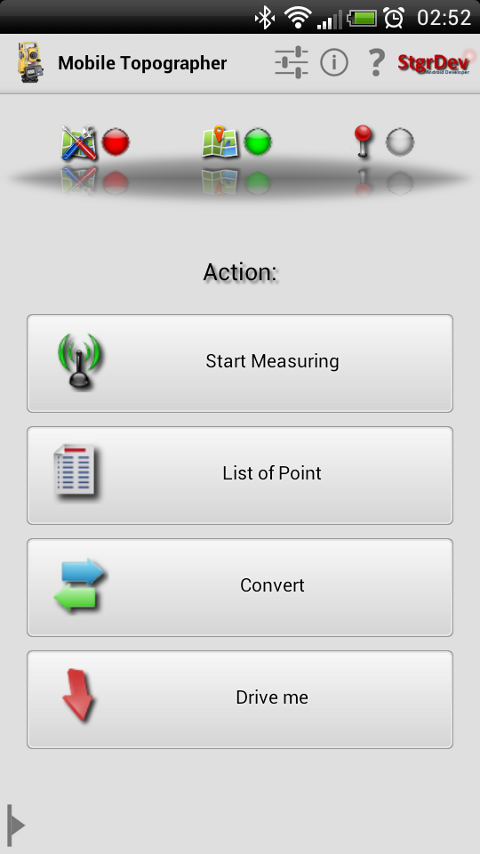
Penggunaan Mobile Topographer cukup simpel
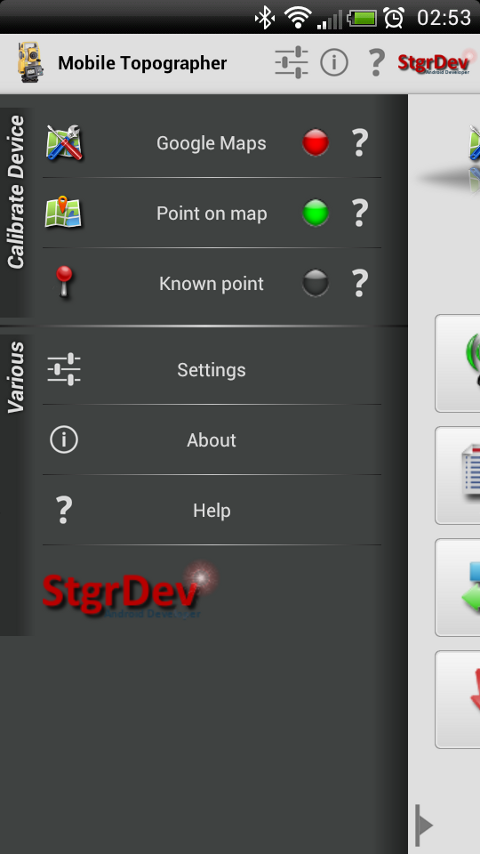
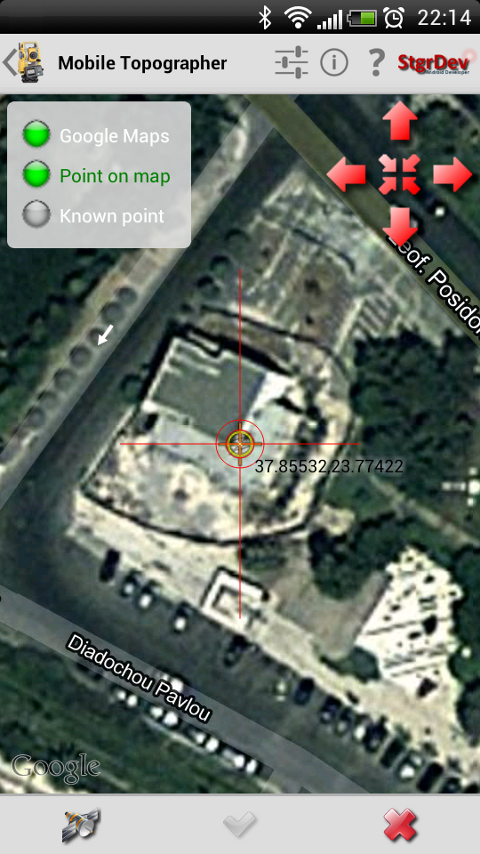
1. Buka aplikasi dari Handphone, tampil menu utama, slide screen ke kanan, muncul menu kalibrasi dan setting. Ada tiga pilihan kalibrasi, Google Maps calibration, Point on Map dan Known point.
2. Untuk kalibrasi metode 1 dan 2. Klik dulu Google Maps calibration. Kalibrasi ini berfungsi untuk mengkalibrasi google maps agar pergeseran posisi yang diakibatkan ketidakakuratan google maps atau koreksi geometrik layanan citra satelit google bisa dihilangkan. Sebagaimana kita tahu bahwa Google tidak mempublish informasi akurasi dari produk spasialnya, sehingga koordinat dari google maps/satellite secara praktis tidak bisa dipercaya untuk pemetaan dengan kebutuhan akurasi 5 meter dan lebih kecil. Masukkan informasi koordinat lokasi pengukuran anda (akan lebih baik jika koordinat ini merupakan koordinat asli dari lokasi tersebut untuk menjamin akurasi hasil pengukuran nantinya). Koordinat yang anda masukkan akan ditampilkan di google maps/satellite. Jika posisi yang ditunjukkan google maps tidak sesuai dengan posisi anda mengukur (sebagai akibat tidak akuratnya google maps/satellite), geser crosshair ke posisi pengukuran anda kemudian klik Accept. Aplikasi akan menggeser koordinat google maps agar sesuai dengan posisi yang anda ukur. Langkah ini berguna agar anda dapat menggunakan google maps/satellite sebagai basemap yang terpercaya sebagai dasar ploting hasil pengukuran anda.
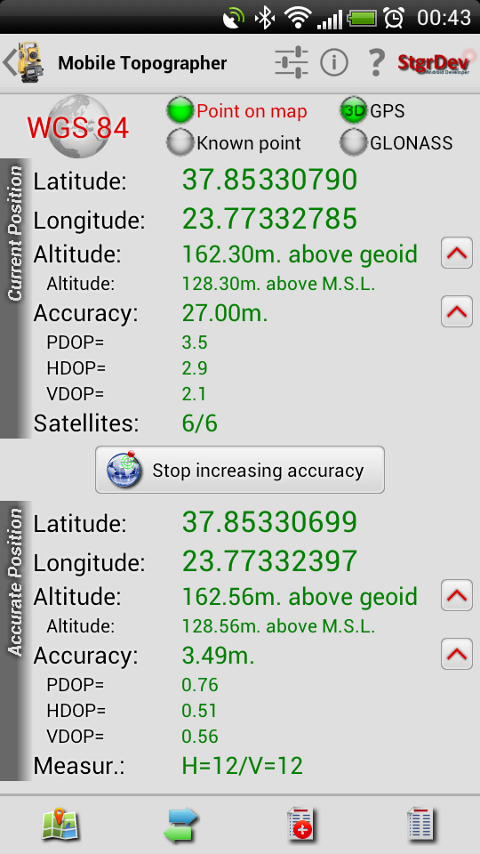
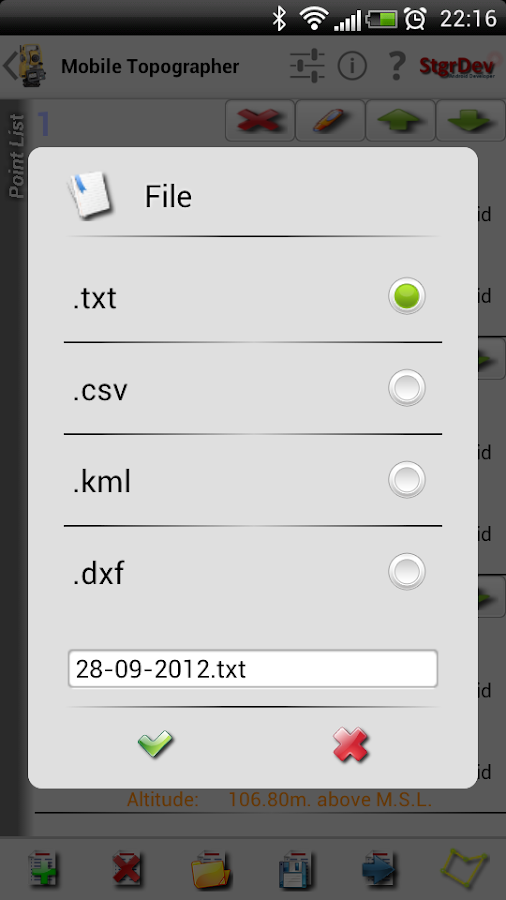
3. Untuk metode 1, klik Point on Map calibration. Aplikasi akan memulai melakukan Weight averaging selama 5 menit untuk menentukan posisi terakurat dari lokasi anda mengukur. Hasilkan akan ditampilkan di peta. Amati posisi yang ditunjukkan. Apabila ada pergeseran dari lokasi anda mengukur, geser crosshair ke lokasi anda mengukur, kemudian klik Accept. Selisih antara hasil weight averaging dan hasil pergeseran crosshair akan digunakan sebagai faktor koreksi untuk pembacaan selanjutnya. Kembali ke menu utama, klik menu survei, aplikasi akan mulai melakukan pembacaan koordinat dari satelit. Setelah informasi koordinat muncul, klik Start Increasing accuracy, aplikasi akan memulai proses weight averaging untuk mencari posisi yang lebih akurat. Jika akurasi sudah menunjukkan angka pembacaan yang diterima, klik tombol Add point untuk menyimpan koordinat hasil pembacaan. Hasil pengukuran dapat juga dilihat di google maps/satellite yang telah dikalibrasi pada step 2 diatas. Selain disimpan sebagai file text dengan ekstensi *pts, hasil pengukuran dapat diexport ke format csv, txt, kml dan dxf.
4. Untuk metode 2, klik Known Point calibration.aplikasi akan melakukan weight averaging selama 5 menit untuk menentukan posisi anda mengukur. setelah koordinat diperoleh, masukkan Koordinat yang anda tahu merupakan koordinat paling akurat dari lokasi tersebut. Selisih dari hasil weight averaging dengan posisi sebenarnya yang anda masukkan akan menjadi faktor koreksi ketika anda mulai mengukur di menu survei.
REVIEW
Pros
1. Adanya Google Maps calibration memungkinkan kita untuk mengubah koordinat layanan google agar "bisa lebih dipercaya" sebagai basemap, mengingat google tidak pernah mempublish akurasi produk spasialnya, terlebih untuk pemetaan skala detil.
2. Fitur weight averaging sendiri sebenarnya merupakan sebuah solusi praktis untuk meningkatkan akurasi di receiver GNSS yang tidak mendukung Code/Carrier Phase differential correction. Intinya pembacaan yang terkalibrasi/terkoreksi always better compared with direct readings. Weight averaging ditujukan untuk mengeliminasi kesalahan akibat pengaruh atmosfer dan penutup lahan (bangunan/pohon).
3. Adanya informasi DOP (Dilution of Precision), baik Horizontal DOP (HDOP), Vertical DOP (VDOP) maupun Positional DOP (PDOP). Informasi DOP ini penting untuk mengetahui sebaran dan geometri satelit di angkasa guna menjamin akurasi yang lebih baik. Lebih jauh tentang DOP dapat dibaca di SINI.
4. Ada fitur navigasi, polygon creation, area measurement, Konversi Koordinat dari Geodetic (latlong) ke Cartesian (UTM) and vice versa dengan berbagai pilihan datum geodetik.
5. Fitur Known Point memungkinkan kalibrasi dengan koordinat "eksternal independen" yang fleksibel, dalam artian kita bisa memanfaatkan data hasil pengukuran DGPS presisi atau sumber data lain yang lebih terjamin akurasinya.
Cons
1. Untuk metode kalibrasi point on map, Weight averaging hanya dilakukan dalam waktu singkat (5 menit), ini terkadang tidak cukup untuk memperoleh koordinat yang akurat. Terlebih jika survei dilakukan di tempat yang pengaruh multipath-nya tinggi (awan tebal, hutan lebat, gedung pencakar langit). Aturan umum tentang weight averaging (karena merupakan teknik statistik) adalah makin banyak sampel makin bagus. Selain itu weight averaging tidak mampu mengkoreksi kesalahan yang diakibatkan geometri satelit yang terlalu menyebar (spread) atau mengumpul (clustered). Kesalahan yang diakibatkan geometri satelit dalam konsep weight averaging hanya dapat diperbaiki dengan melakukan multisample weight averaging, yaitu weight averaging dari banyak short time averaging (sekitar 5 menit) dengan selisih minimal 15 menit per averaging dalam waktu yang panjang (mulai dari 1,5 jam sampai seharian penuh hehe). Dalam beberapa puluh menit, geometri satelit akan berubah sehingga efek kesalahan geometri satelit ini akan bisa direspon dalam proses averaging berupa perataan dari hasil pembacaan pada kondisi geometri satelit yang berbeda. Multisample weight averaging saat ini baru diimplementasikan di receiver GPS Garmin keluaran terbaru.
2. Karena tidak melihat kesalahan penentuan posisi yang didasarkan pada sinyal yang diterima (code/carrier phase) maka koordinat akurat dari aplikasi ini hanya bisa dianggap sebagai "indikasi" sebagaimana dengan hasil prediksi berbasis statistik lainnya.
3. Weight averaging is annoying dude, because its taking too damn looonggg time to achieve good results.
If you find this application is useful, please consider to buy the PRO version with more features for only Rp 250.000 :) *helping the devs
Koreksi diferensial dapat dilakukan secara otomatis secara real time (saat pengukuran di lapangan) atau post processing (koreksi pasca lapangan di komputer). Koreksi diferensial dapat dilakukan secara manual/praktis atau otomatis menggunakan software, yang penting pengamatan koordinat pada lokasi yang diukur dan lokasi referensi dilakukan pada waktu yang sama persis.
Umumnya dukungan koreksi diferensial yang "robust" hanya tersedia pada perangkat receiver/antenna yang mendukung code dan atau carrier phase (receiver kelas mapping sampai geodetic), sementara untuk perangkat GPS handheld/navigasi, proses ini agak sulit untuk dilakukan secara presisi.
Walaupun demikian, sebagaimana pengembangan teknik dan alat pengukuran GPS untuk memperoleh koordinat yang akurat yang selalu berkembang, terdapat banyak cara untuk melakukan koreksi diferensial di perangkat GPS navigasi, bahkan handphone sebagaimana yang bisa dilakukan oleh aplikasi Mobile Topographer di sistem operasi Android.
Mobile Topographer dapat diunduh dari Google Play di SINI.






Ada dua cara yang bisa digunakan untuk menentukan lokasi referensi/base (yang dianggap akurat, presisi, bebas distorsi, lokasi ini digunakan sebagai referensi untuk mengkoreksi pembacaan alias rover) dalam Mobile Topographer,
1. Dengan cara Weight/Waypoint Averaging yang didasarkan pada perataan hasil logging data selama 5 menit dengan interval logging 1 detik. Weight Averaging adalah teknik perataan koordinat yang diambil dari dua atau lebih koordinat dari pembacaan GPS pada lokasi yang sama guna menghasilkan koordinat rata rata yang diasumsikan sebagai koordinat paling akurat (biasanya memang lebih akurat daripada pembacaan langsung sebagaimana biasa dilakukan di perangkat GPS handheld/navigasi) dan presisi dari lokasi yang bersangkutan. Lokasi hasil averaging kemudian ditampilkan di peta/google maps. Kemudian operator melihat kesesuaian antara lokasi hasil averaging yang ditampilkan di peta dengan lokasi lapangan, jika ada pergeseran, operator diminta memindahkan lokasi titik ke lokasi sebenarnya di lapangan. Perpindahan ini dianggap sebagai faktor koreksi oleh aplikasi, yang kemudian dijadikan dasar koreksi untuk pembacaan/logging data GPS selanjutnya.
2. Dengan memasukkan "known point" atau memasukkan koordinat "asli atau akurat" dari lokasi tersebut secara manual, kemudian aplikasi akan menghitung menggunakan weight averaging koordinat lokasi tersebut dalam selang waktu tertentu, selanjutnya hasil pembacaan averaging tersebut dibandingkan dengan data "known point" tersebut, dan selisihnya dijadikan faktor koreksi untuk pembacaan selanjutnya.
Penggunaan Mobile Topographer cukup simpel
1. Buka aplikasi dari Handphone, tampil menu utama, slide screen ke kanan, muncul menu kalibrasi dan setting. Ada tiga pilihan kalibrasi, Google Maps calibration, Point on Map dan Known point.
2. Untuk kalibrasi metode 1 dan 2. Klik dulu Google Maps calibration. Kalibrasi ini berfungsi untuk mengkalibrasi google maps agar pergeseran posisi yang diakibatkan ketidakakuratan google maps atau koreksi geometrik layanan citra satelit google bisa dihilangkan. Sebagaimana kita tahu bahwa Google tidak mempublish informasi akurasi dari produk spasialnya, sehingga koordinat dari google maps/satellite secara praktis tidak bisa dipercaya untuk pemetaan dengan kebutuhan akurasi 5 meter dan lebih kecil. Masukkan informasi koordinat lokasi pengukuran anda (akan lebih baik jika koordinat ini merupakan koordinat asli dari lokasi tersebut untuk menjamin akurasi hasil pengukuran nantinya). Koordinat yang anda masukkan akan ditampilkan di google maps/satellite. Jika posisi yang ditunjukkan google maps tidak sesuai dengan posisi anda mengukur (sebagai akibat tidak akuratnya google maps/satellite), geser crosshair ke posisi pengukuran anda kemudian klik Accept. Aplikasi akan menggeser koordinat google maps agar sesuai dengan posisi yang anda ukur. Langkah ini berguna agar anda dapat menggunakan google maps/satellite sebagai basemap yang terpercaya sebagai dasar ploting hasil pengukuran anda.
3. Untuk metode 1, klik Point on Map calibration. Aplikasi akan memulai melakukan Weight averaging selama 5 menit untuk menentukan posisi terakurat dari lokasi anda mengukur. Hasilkan akan ditampilkan di peta. Amati posisi yang ditunjukkan. Apabila ada pergeseran dari lokasi anda mengukur, geser crosshair ke lokasi anda mengukur, kemudian klik Accept. Selisih antara hasil weight averaging dan hasil pergeseran crosshair akan digunakan sebagai faktor koreksi untuk pembacaan selanjutnya. Kembali ke menu utama, klik menu survei, aplikasi akan mulai melakukan pembacaan koordinat dari satelit. Setelah informasi koordinat muncul, klik Start Increasing accuracy, aplikasi akan memulai proses weight averaging untuk mencari posisi yang lebih akurat. Jika akurasi sudah menunjukkan angka pembacaan yang diterima, klik tombol Add point untuk menyimpan koordinat hasil pembacaan. Hasil pengukuran dapat juga dilihat di google maps/satellite yang telah dikalibrasi pada step 2 diatas. Selain disimpan sebagai file text dengan ekstensi *pts, hasil pengukuran dapat diexport ke format csv, txt, kml dan dxf.
4. Untuk metode 2, klik Known Point calibration.aplikasi akan melakukan weight averaging selama 5 menit untuk menentukan posisi anda mengukur. setelah koordinat diperoleh, masukkan Koordinat yang anda tahu merupakan koordinat paling akurat dari lokasi tersebut. Selisih dari hasil weight averaging dengan posisi sebenarnya yang anda masukkan akan menjadi faktor koreksi ketika anda mulai mengukur di menu survei.
REVIEW
Pros
1. Adanya Google Maps calibration memungkinkan kita untuk mengubah koordinat layanan google agar "bisa lebih dipercaya" sebagai basemap, mengingat google tidak pernah mempublish akurasi produk spasialnya, terlebih untuk pemetaan skala detil.
2. Fitur weight averaging sendiri sebenarnya merupakan sebuah solusi praktis untuk meningkatkan akurasi di receiver GNSS yang tidak mendukung Code/Carrier Phase differential correction. Intinya pembacaan yang terkalibrasi/terkoreksi always better compared with direct readings. Weight averaging ditujukan untuk mengeliminasi kesalahan akibat pengaruh atmosfer dan penutup lahan (bangunan/pohon).
3. Adanya informasi DOP (Dilution of Precision), baik Horizontal DOP (HDOP), Vertical DOP (VDOP) maupun Positional DOP (PDOP). Informasi DOP ini penting untuk mengetahui sebaran dan geometri satelit di angkasa guna menjamin akurasi yang lebih baik. Lebih jauh tentang DOP dapat dibaca di SINI.
4. Ada fitur navigasi, polygon creation, area measurement, Konversi Koordinat dari Geodetic (latlong) ke Cartesian (UTM) and vice versa dengan berbagai pilihan datum geodetik.
5. Fitur Known Point memungkinkan kalibrasi dengan koordinat "eksternal independen" yang fleksibel, dalam artian kita bisa memanfaatkan data hasil pengukuran DGPS presisi atau sumber data lain yang lebih terjamin akurasinya.
Cons
1. Untuk metode kalibrasi point on map, Weight averaging hanya dilakukan dalam waktu singkat (5 menit), ini terkadang tidak cukup untuk memperoleh koordinat yang akurat. Terlebih jika survei dilakukan di tempat yang pengaruh multipath-nya tinggi (awan tebal, hutan lebat, gedung pencakar langit). Aturan umum tentang weight averaging (karena merupakan teknik statistik) adalah makin banyak sampel makin bagus. Selain itu weight averaging tidak mampu mengkoreksi kesalahan yang diakibatkan geometri satelit yang terlalu menyebar (spread) atau mengumpul (clustered). Kesalahan yang diakibatkan geometri satelit dalam konsep weight averaging hanya dapat diperbaiki dengan melakukan multisample weight averaging, yaitu weight averaging dari banyak short time averaging (sekitar 5 menit) dengan selisih minimal 15 menit per averaging dalam waktu yang panjang (mulai dari 1,5 jam sampai seharian penuh hehe). Dalam beberapa puluh menit, geometri satelit akan berubah sehingga efek kesalahan geometri satelit ini akan bisa direspon dalam proses averaging berupa perataan dari hasil pembacaan pada kondisi geometri satelit yang berbeda. Multisample weight averaging saat ini baru diimplementasikan di receiver GPS Garmin keluaran terbaru.
2. Karena tidak melihat kesalahan penentuan posisi yang didasarkan pada sinyal yang diterima (code/carrier phase) maka koordinat akurat dari aplikasi ini hanya bisa dianggap sebagai "indikasi" sebagaimana dengan hasil prediksi berbasis statistik lainnya.
3. Weight averaging is annoying dude, because its taking too damn looonggg time to achieve good results.
If you find this application is useful, please consider to buy the PRO version with more features for only Rp 250.000 :) *helping the devs

Comments
Post a Comment